

Il modo in cui Tesla determina il limite di velocità di una strada è una domanda comune tra i proprietari. La spiegazione più semplice è che l'auto legge i segnali stradali mentre li supera, ma questo racconta solo una parte della storia. In pratica, il veicolo confronta continuamente ciò che rilevano le telecamere con i dati cartografici preesistenti, e il limite mostrato alla fine è il risultato di come queste due fonti vengono bilanciate.
La potenza e i limiti della visione
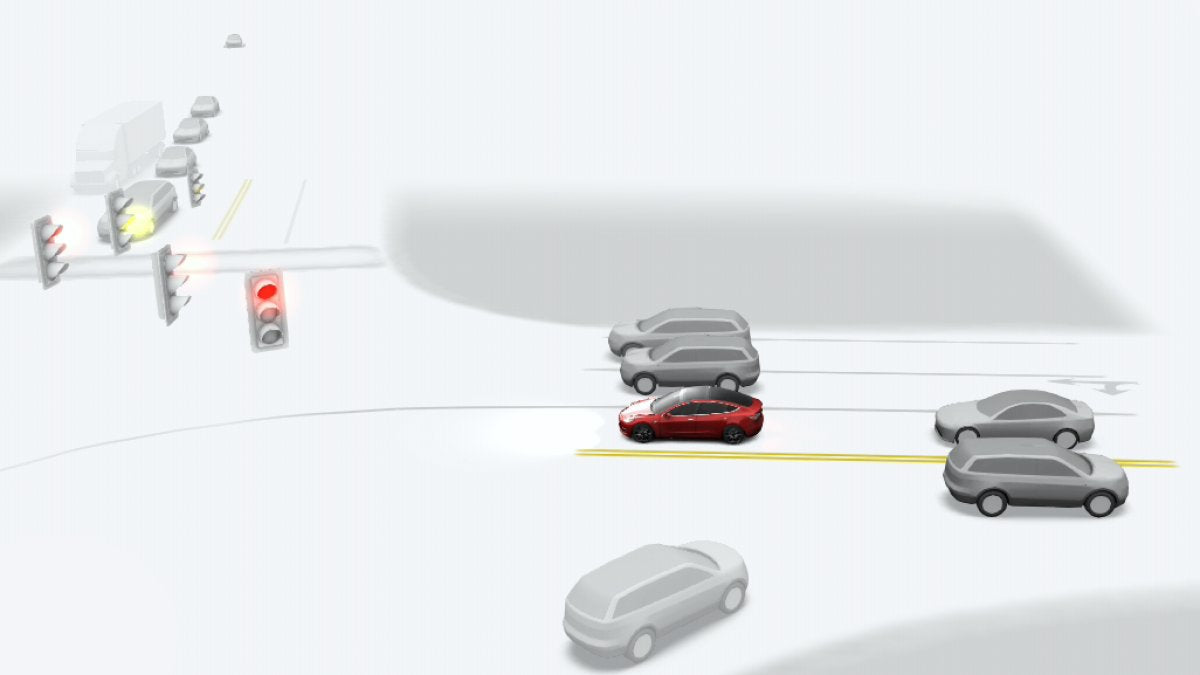
Tesla si affida a più reti neurali come parte dello stack Tesla Vision e di Full Self-Driving (FSD). Una di queste reti è addestrata per il riconoscimento ottico dei caratteri (OCR), che permette all'auto di leggere in tempo reale i segnali dei limiti di velocità mentre li attraversa. La visione è particolarmente utile nelle situazioni dinamiche che le mappe statiche non possono cogliere, per esempio i limiti temporanei nelle aree di cantiere.
La visione ha però dei limiti. Una scarsa visibilità può far sì che il sistema non rilevi i segnali, e anche nelle giornate limpide i cartelli possono essere nascosti da riflessi del sole, vegetazione folta o altri veicoli. Anche i segnali posizionati lontano dalla carreggiata possono non essere letti. Il sistema può inoltre interpretare in modo errato alcuni caratteri; un errore segnalato di frequente è confondere i limiti di 80 e 60, anche se la maggior parte della segnaletica viene rilevata correttamente.
Il supporto: i dati cartografici
Per affrontare le imperfezioni della sola visione, Tesla confronta le letture delle telecamere con dati cartografici ad alta fedeltà che includono attributi come i limiti di velocità per specifici tratti di strada. I dati cartografici forniscono un riferimento stabile che non è influenzato dal meteo, dai veicoli in transito o da segnali danneggiati o mancanti.
Il compromesso è che le mappe possono diventare obsolete. Se un comune riduce il limite di velocità di una strada, può esserci un ritardo prima che il limite aggiornato venga riflesso negli aggiornamenti delle mappe di Tesla, quindi la mappa può indicare temporaneamente un limite più alto rispetto ai segnali stradali.
Come funzionano insieme
La forza del sistema sta nel modo in cui combina visione e mappe. Il veicolo esegue continuamente controlli di coerenza tra ciò che vedono le telecamere e ciò che indicano i dati cartografici.
Se il sistema di visione ha poca fiducia — per esempio, quando non riesce a leggere chiaramente un segnale o c'è un conflitto diretto — l'auto spesso si affida ai dati cartografici, che in genere sono la scelta più sicura. Al contrario, quando il sistema di visione ha alta fiducia di aver rilevato un segnale, soprattutto segnaletica temporanea come nelle aree di cantiere, sovrascrive i dati cartografici così che il veicolo possa adattarsi alle condizioni attuali.
Occasionalmente l'interazione di questi sistemi può produrre un comportamento confuso: se la mappa contiene un limite errato per un segmento GPS, la mappa potrebbe sovrascrivere temporaneamente il sistema di visione e indurre il veicolo a rallentare o accelerare in modo inatteso.
Un esempio reale
Un caso illustrativo è una strada locale dove FSD legge spesso un segnale di limite minimo di 40 km/h come limite applicabile, anche se il limite di velocità reale è 80 km/h. Invece di scendere subito alla velocità inferiore, FSD può rallentare leggermente per adeguarsi al flusso del traffico, continuare a mostrare il limite superiore precedente e poi tornare a 80 km/h sul display una volta che i sistemi si sono riallineati.
Determinare il corretto limite di velocità è un equilibrio complesso che migliorerà con le iterazioni continue, ma l'approccio attuale — combinare la visione in tempo reale con dati cartografici persistenti — funziona efficacemente nella maggior parte delle situazioni, a parte occasionali letture errate su percorsi poco trafficati. Puoi leggere di più sui dati pre-mappati e su come influenzano ciò che il tuo veicolo vede in un articolo precedente.














Condividi:
Musk punta a un ciclo di chip di 9 mesi per Tesla; parla di AI5, AI6 e di IA spaziale
Il Cybercab di Tesla avvistato con lavacamera posteriore; senza specchietti laterali