

L'approccio di Tesla basato solo sulle telecamere all'autonomia è spesso criticato per il suo comportamento in condizioni meteorologiche avverse. Gli scettici sostengono che radar, LiDAR e sensori a ultrasuoni (USS) siano più adatti alle condizioni difficili, mentre Tesla afferma che Tesla Vision funziona meglio di più sensori.
Questo mese, l'azienda ha pubblicato un brevetto intitolato "Fail-Safe Corrective Actions Based on Vision Information for Autonomous Vehicles", che descrive come FSD reagisce al maltempo. Anziché fermarsi quando la visibilità peggiora, il sistema identifica il tipo di ostruzione e applica contromisure per continuare a operare in sicurezza.
Griglia di visibilità e tag di scena
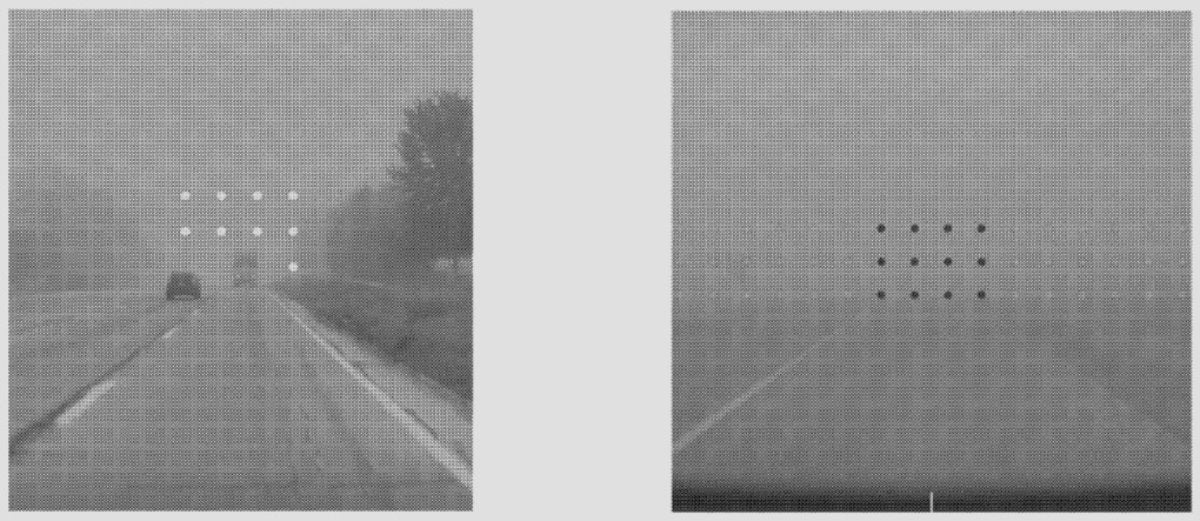
Per gestire input delle telecamere degradati, le reti neurali di Tesla elaborano continuamente i frame delle telecamere del veicolo ad alte frequenze—circa 30 Hz (HW3) o 60 Hz (AI4). Quando la visuale di una telecamera è ostruita, FSD non si limita a segnalare un errore. Suddivide l'immagine in una griglia di regioni rettangolari di pixel e assegna a ciascuna regione un valore di visibilità.
La scala va da 0 a 3, dove 0 indica una visuale chiara e 3 significa che l'immagine è completamente occlusa. Dopo aver mappato la gravità, il sistema va oltre identificandone la causa. La rete neurale assegna specifici "tag di scena" alle regioni interessate.
Può etichettare condizioni come foschia, condensa, ghiaccio, acqua, pioggia, abbagliamento solare, nebbia, fumo e spruzzi degli pneumatici. Il sistema può anche rilevare un parabrezza sporco o problemi hardware come pixel morti.
Contromisure hardware attive
L'elemento più notevole del brevetto è il modo in cui il veicolo reagisce a questi tag. Tesla ha integrato la rete neurale di visibilità con l'hardware del veicolo, così che un alto valore di visibilità associato a un tag specifico attivi azioni automatizzate e fail-safe. Se la scena è etichettata come piovosa, il sistema può attivare automaticamente i tergicristalli, mentre altri tag di bassa visibilità possono accendere i fari o le luci di emergenza.

Se rileva "snow" o "condensation", il veicolo può attivare i riscaldatori del parabrezza o i sistemi disappannanti del climatizzatore per pulire il vetro. Le reti neurali possono anche cambiare corsia per evitare pericoli, ad esempio allontanandosi dai forti spruzzi degli pneumatici di un camion che precede. Tra le funzionalità descritte, questa sembra essere l'unica non ancora implementata oggi in FSD.
Con la pioggia, FSD 14.3 ti blocca su chill o sloth. Standard, hurry e mad Max non sono disponibili. pic.twitter.com/hm1G4ibgla
— Dirty Tesla (@DirtyTesLa) 10 aprile 2026
Ridurre le frenate fantasma
Oltre a liberare la visuale delle telecamere, il brevetto affronta il problema delle frenate fantasma. I sistemi basati sulla visione hanno storicamente prodotto falsi positivi quando la visibilità è bassa; per esempio, una densa coltre di nebbia o una colonna di scarico possono essere scambiate per un oggetto.
Il brevetto delinea un metodo per ridurre le rilevazioni errate. Poiché la rete neurale etichetta le scene con valori di visibilità, può riconoscere quando sta operando in un ambiente compromesso.
Se l'auto rileva ciò che sembra un ostacolo mentre la griglia di visibilità indica una grave occlusione dovuta a fumo o nebbia, FSD può dedurre che l'oggetto sia probabilmente un artefatto visivo. Usando questo contesto di visibilità, il Model basato sulla visione sopprime le frenate non necessarie, offrendo una guida più fluida e sicura.














Condividi:
Tesla sta pianificando un hub dedicato ai robotaxi in Texas [VIDEO]
Tesla afferma che la Roadster è attualmente in fase di test e verrà prodotta in Texas