

Gli automobilisti dipendono da tempo dal Global Positioning System (GPS) per guidare i veicoli, che funziona bene sulle strade aperte ma fallisce nei luoghi in cui i segnali satellitari scompaiono—come aree sotterranee, parcheggi multipiano e canyon urbani densamente edificati.
Per una persona, perdere la navigazione in un garage è scomodo. Per un sistema autonomo, è una perdita critica dell’orientamento.
Un brevetto Tesla appena pubblicato, intitolato Modeling Techniques for Vision-Based Path Determination (US 2026/0098740), spiega come l’azienda affronta questo limite.
Eliminando la dipendenza dai dati di posizione derivati dai satelliti e adottando un approccio autonomo basato sulla visione, Tesla punta a rendere il servizio Robotaxi robusto nei parcheggi sotterranei, gettando al tempo stesso le basi delle capacità di navigazione fondamentali per il robot umanoide Optimus.
Il problema dei canyon di cemento
La localizzazione tradizionale nell’autonomia combina in genere coordinate GPS ad alta definizione, già mappate in precedenza, con sensori di bordo per stimare la posizione.
In un parcheggio multipiano, il cemento armato blocca completamente il GPS. Senza un fix satellitare, un sistema convenzionale non può localizzarsi, scegliere un percorso verso un posto libero o trovare un’uscita. Il veicolo opera quindi in uno spazio affollato e dinamico, con pedoni, carrelli e conducenti umani, ma senza una posizione globale affidabile.
Tesla ha stabilito che una rete Robotaxi davvero senza supervisione non può dipendere da un segnale esterno. Se un Robotaxi finisce al quarto livello di un parcheggio sotterraneo di un centro commerciale e perde il contatto satellitare, il sistema deve comunque localizzarsi e navigare usando solo l’hardware di bordo.
Come funziona il cervello basato sulla visione

Il brevetto descrive un metodo che permette all’ego FSD di Tesla di percepire l’ambiente circostante, determinare la propria posa e pianificare il movimento senza GPS o altri sensori esterni di tracciamento della posizione. L’“ego” può essere sia un veicolo autonomo sia un robot umanoide.
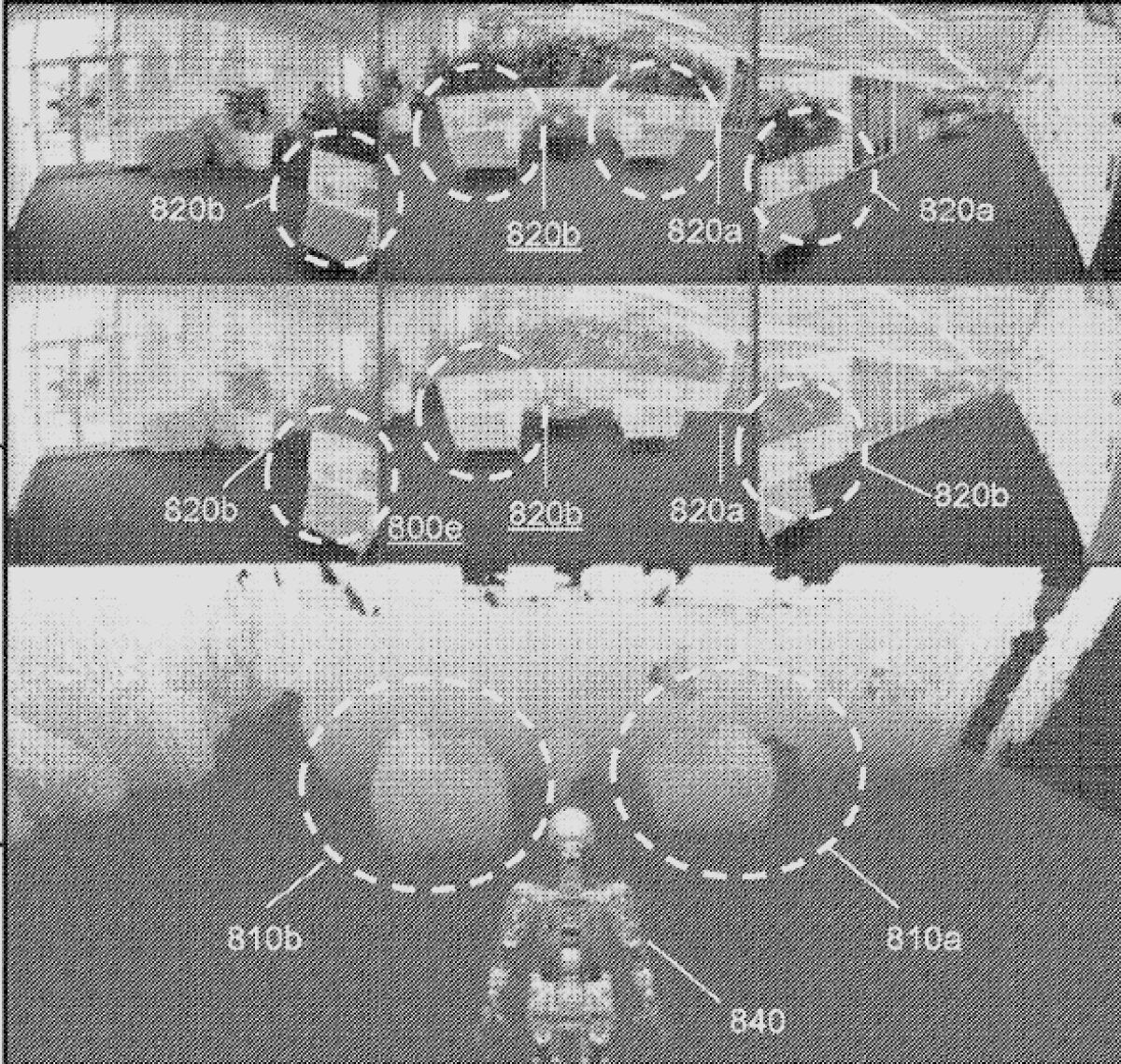
Invece di cercare un segnale satellitare, il sistema usa gli input live delle telecamere per costruire una rappresentazione 3D in tempo reale della scena tramite una Occupancy Network estremamente complessa.
Il computer suddivide lo spazio in minuscole celle tridimensionali note come voxel. In tempo reale, la rete neurale valuta ogni voxel in base a due proprietà: se è occupato o libero e quali attributi di superficie ha—for example, distinguendo asfalto percorribile, marciapiede in cemento o una linea di parcheggio dipinta.
Localizzazione senza GPS tramite la visione
Costruire una mappa 3D è solo il primo passo; il sistema deve anche determinare la propria posizione precisa all’interno di quella mappa. Il brevetto descrive un metodo di localizzazione basato sulla visione che non richiede il GPS.
Mentre le telecamere scandagliano il garage, la rete individua ancoraggi visivi distintivi nell’ambiente—chiamati caratteristiche chiave dell’immagine—come un cartello di uscita ben visibile, un estintore montato su un pilastro o una particolare crepa in una parete.
Il computer tiene traccia di come queste caratteristiche si spostano nei fotogrammi consecutivi mentre il veicolo avanza. Misurando le variazioni della loro distanza apparente e dell'angolo rispetto alle telecamere, il sistema calcola la posizione esatta dell'ego all'interno del suo Model 3D costruito internamente, indipendentemente da riferimenti esterni.
Con la posizione nota e l’ambiente modellato, il pianificatore applica l’ottimizzazione della traiettoria. Il brevetto menziona specificamente l’uso di un Iterative Linear Quadratic Regulator per calcolare un percorso sicuro e fluido, modulando continuamente la velocità in avanti, il movimento laterale e il tasso di imbardata per aggirare gli ostacoli e raggiungere lo stallo di parcheggio target.
Risolvere il parcheggio sotterraneo per FSD
Questa localizzazione basata sulla visione è già presente nei veicoli dei clienti e sta alla base del comportamento che consente ad Actually Smart Summon di funzionare in modo efficace.
FSD v14.3.2 entra in un parcheggio sotterraneo, si avvicina fino al distributore del ticket e prosegue quando si apre. pic.twitter.com/HjvBYdcCft
— Zack (@BLKMDL3) April 26, 2026
Quando il proprietario richiama l’auto attraverso un parcheggio, il veicolo non usa il GPS per localizzarlo. Costruisce una mappa 3D con la rete di occupazione basata sui voxel, si aggancia alle caratteristiche chiave dell’immagine per seguire i progressi e pianifica un percorso che si adatta a pedoni e carrelli fuori traiettoria.
Con l’avanzare del Full Self-Driving, questa mappatura visiva locale permetterà alle auto di serie di entrare in strutture sotterranee complesse, trovare posti disponibili, parcheggiare e poi uscire—senza fare affidamento sui dati satellitari.
La sfida definitiva: Optimus
Lo stesso approccio si applica direttamente a Optimus. Mentre le auto incontrano solo a volte zone cieche del GPS, i robot umanoidi operano quasi interamente al loro interno.
Che un’unità Optimus stia spostando pesanti fusioni sul pavimento di Gigafactory Texas o piegando il bucato in una casa, non può contare sul GPS. Deve percepire l’ambiente circostante, evitare ostacoli in movimento e conoscere la propria posa usando solo le telecamere nella testa.
Poiché lo stack di IA è progettato per essere indipendente dalla piattaforma, l’architettura descritta nel brevetto è condivisa tra veicoli e robot. Optimus usa le telecamere per generare la stessa mappa 3D a voxel, identifica caratteristiche chiave dell’immagine in un’abitazione—come un televisore o un cuscino del divano distintivo—per localizzarsi e poi applica la stessa ottimizzazione della traiettoria per tracciare un percorso sicuro verso la cucina senza urtare i mobili.
Risolvere i garage per i veicoli risolve anche la navigazione indoor per gli umanoidi. Il risultato è un sistema di navigazione localizzato, solo visivo, progettato per gestire ambienti complessi, sia che rotoli su quattro ruote sia che cammini su due gambe.














Condividi:
Tesla avvia la produzione ad alto volume del Semi in Nevada
Tesla avvia un richiamo fisico per le ruote in acciaio da 18 pollici del Cybertruck; svela le vendite del Cybertruck RWD