
Il nuovo brevetto di Tesla spiega la guida simile a quella umana di FSD V14 e la magia dietro v14-Lite
Il passaggio di Tesla all'architettura software V14 ha cambiato in modo evidente il comportamento dei suoi veicoli su strada. La frenata esitante, eccessivamente prudente, vista nelle versioni precedenti ha lasciato in gran parte il posto a una guida più fluida e sicura di sé, che risulta naturale.
Un brevetto intitolato "Artificial Intelligence Modeling Techniques for Joint Behavior Planning and Forecasting" (US 2026/0105614) descrive in dettaglio come è stato ottenuto questo cambiamento. Le tecniche descritte mostrano anche come questi comportamenti possano funzionare sui veicoli più vecchi con Hardware 3 tramite il prossimo aggiornamento v14-lite.
Il problema di forzare l'autonomia con la brute force
Gli approcci tradizionali, comprese le iterazioni precedenti di Autopilot e FSD (pre-V12), si basavano su milioni di righe di codice euristico in C++.
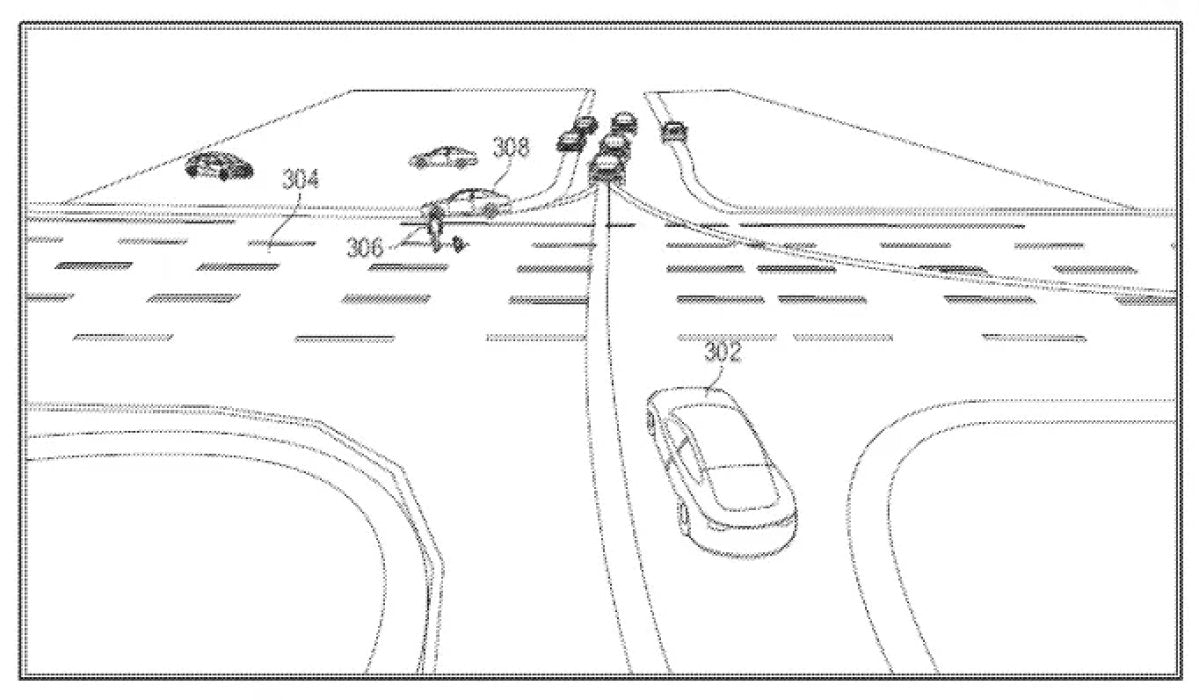
Quando si avvicinava a un incrocio trafficato, il software precedente tentava una strategia brute force, cercando di calcolare in una sola volta ogni possibile traiettoria futura per tutti gli oggetti in movimento: prevedendo contemporaneamente il percorso di un pedone, la velocità di un camion in arrivo e la probabilità che un ciclista sterzasse.
Ciò richiedeva una notevole potenza di elaborazione e spesso introduceva latenza, che si traduceva in una guida a scatti, eccessivamente prudente, robotica.

Il grafo nodale gerarchico
Il brevetto sostituisce la brute force con un framework decisionale snello basato su un "grafo nodale gerarchico".
Invece di esplorare tutti i futuri possibili, l'IA costruisce un albero decisionale efficiente incentrato su obiettivi concreti e sulle interazioni sequenziali rilevanti per tali obiettivi. Definisce un Nodo Obiettivo — ad esempio eseguire una svolta a sinistra non protetta attraverso due corsie di traffico — e poi crea Nodi di Interazione solo per gli agenti che contano per quell'obiettivo.
Piuttosto che elaborare un intero incrocio in una sola volta, la rete neurale collega in sequenza i nodi pertinenti. Il piano risultante diventa una chiara catena di passaggi: dare precedenza a un pedone che attraversa, attendere che passi la prima auto in arrivo, quindi accelerare dietro di essa.

Pensare come un essere umano
Il cambiamento più evidente — e il motivo per cui V14 sembra così diverso — è il modo in cui la rete valuta le possibili interazioni.
Ogni azione potenziale riceve un "Punteggio del Nodo". I vincoli basati sulla fisica restano la priorità assoluta per impedire qualsiasi traiettoria che possa causare una collisione, ma il sistema dà risalto anche a tre ulteriori fattori centrati sull'essere umano:
Comfort: questa manovra scuoterà gli occupanti o farà rovesciare un caffè?
Probabilità di intervento: il comportamento è così innaturale o aggressivo che un guidatore umano interverrebbe disattivando il sistema?
Il discriminatore simile a quello umano: riflette il modo in cui guidano davvero le persone?
Il sistema valuta le manovre candidate rispetto a un ampio insieme di comportamenti di guida umana. Favorendo il punteggio più alto nel discriminatore simile a quello umano, adotta in modo naturale il flusso fluido e deciso associato ai guidatori esperti, invece di un movimento rigido e puramente matematico.
Pruning aggressivo e futuro di HW3
La valutazione consente un potente risparmio di efficienza che il brevetto definisce pruning aggressivo.
Poiché ogni ramo dell'albero decisionale viene valutato, il sistema può scartare immediatamente le opzioni scadenti. Per esempio, se un'interazione tagliasse la strada a un pedone — aumentando il rischio di collisione e la probabilità di intervento — l'intero ramo viene eliminato e non viene più calcolato.
I nodi rimanenti con punteggio elevato vengono aggregati in un punteggio finale della traiettoria, e il veicolo esegue il piano vincente.
Questo pruning è fondamentale per la compatibilità retroattiva. Durante la conference call sui risultati del primo trimestre 2026, Ashok Elluswamy ha confermato che il prossimo aggiornamento v14-Lite porterà la parità funzionale delle funzionalità alle auto HW3 più vecchie, anche se quel hardware non dispone della potenza grezza necessaria per le operazioni Robotaxi.
Rimuovendo rapidamente le scelte inferiori dalla considerazione attiva tramite il grafo nodale gerarchico, il calcolo complessivo necessario per navigare ambienti urbani complessi si riduce notevolmente.
Questa efficienza software consente ai computer HW3 meno potenti di eseguire la logica comportamentale più avanzata di V14 senza essere sopraffatti.
Il brevetto evidenzia che l'efficienza software può essere un vantaggio decisivo: guidando in modo più simile agli esseri umani, il sistema ottiene di più con molto meno.
Se questo sguardo su come FSD prende decisioni ti è stato utile, potrebbe interessarti anche il resto della serie di approfondimenti:
Come funziona FSD Parte 1
Come funziona FSD Parte 2
Come funziona FSD Parte 3
Come funziona FSD Parte 4
Come funziona FSD Parte 5
Il traduttore AI universale di Tesla
Come Tesla ottimizza FSD
Come Tesla etichetterà i dati con l'IA
Come Tesla risolve le zone morte del GPS














Condividi:
Tesla Cybercab avvistato durante i test con antenna Starlink
Tesla lancerà presto FSD v14.3 con le funzionalità dell'aggiornamento primaverile