
Tesla's New Patent Explains the Human-Like Driving of FSD V14 and the Magic Behind v14-Lite
Tesla’s move to the V14 software architecture has noticeably changed how its vehicles behave on the road. The hesitant, overly cautious braking seen in earlier versions has largely given way to smoother, more confident driving that feels natural.
A patent titled "Artificial Intelligence Modeling Techniques for Joint Behavior Planning and Forecasting" (US 2026/0105614) details how this shift was accomplished. The techniques it describes also show how these behaviors can run on older Hardware 3 vehicles via the upcoming v14-lite update.
The Problem with Brute Forcing Autonomy
Traditional approaches, including earlier iterations of Autopilot and FSD (pre-V12), relied on millions of lines of heuristic C++ code.
When approaching a busy intersection, the older software attempted a brute-force strategy, trying to compute every possible future trajectory for all moving objects at once—predicting a pedestrian’s path, an oncoming truck’s speed, and the likelihood that a cyclist would swerve, all simultaneously.
This demanded substantial processing power and often introduced latency, which manifested as jerky, overly cautious, robotic driving.

The Hierarchical Nodal Graph
The patent replaces brute force with a streamlined decision-making framework based on a "hierarchical nodal graph".
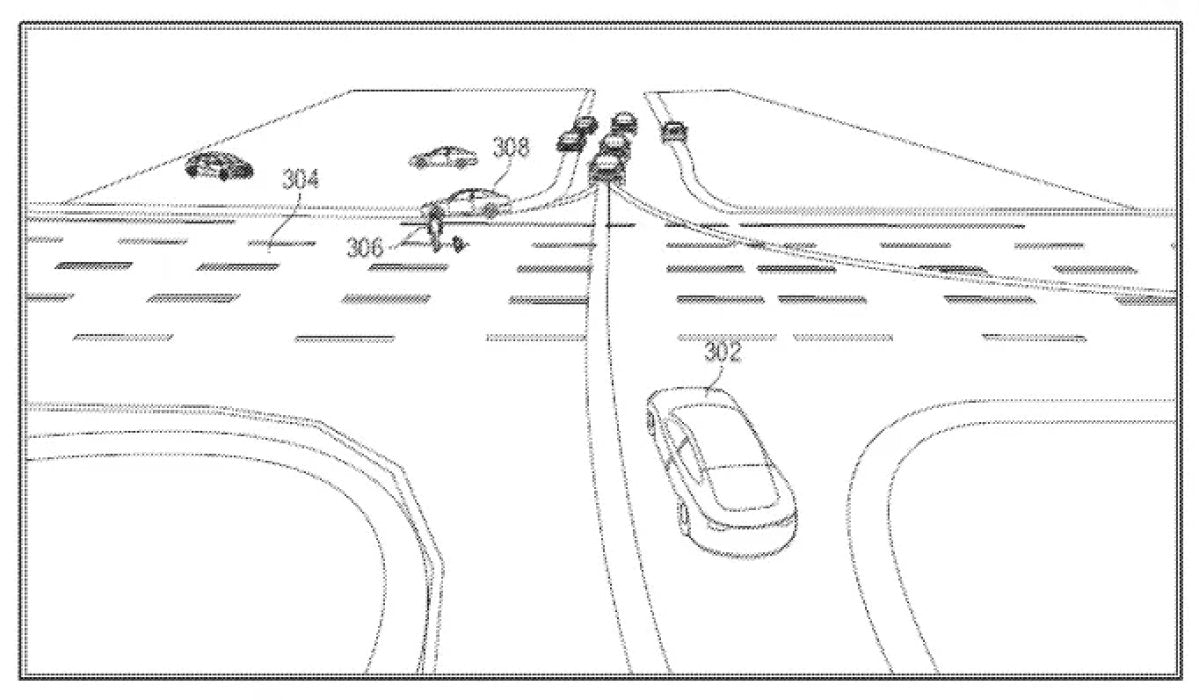
Instead of exploring all futures, the AI constructs an efficient decision tree centered on concrete goals and the sequential interactions relevant to those goals. It defines a Goal Node—such as executing an unprotected left turn across two lanes of traffic—and then creates Interaction Nodes only for agents that matter to that goal.
Rather than processing an entire intersection at once, the neural network links the pertinent nodes in sequence. The resulting plan becomes a clear chain of steps: yield to a crossing pedestrian, wait for the first oncoming car to pass, then accelerate behind it.

Thinking Like a Human
The standout change—and why V14 feels so different—is how the network scores possible interactions.
Each potential action receives a "Node Score." Physics-based constraints remain the top priority to prevent any path that could cause a collision, but the system also emphasizes three additional, human-centered factors:
Comfortability: Will this maneuver jolt occupants or spill a coffee?
Intervention Likelihood: Is the behavior so unnatural or aggressive that a human driver would intervene and disengage?
The Human-Like Discriminator: Does this reflect how people actually drive?
The system evaluates candidate maneuvers against a large base of human driving behavior. By favoring the highest score on the human-like discriminator, it naturally adopts the smooth, assertive flow associated with experienced drivers, rather than rigid, purely mathematical motion.
Aggressive Pruning and HW3’s Future
Scoring enables a powerful efficiency shortcut the patent terms aggressive pruning.
Because every branch of the decision tree is graded, the system can immediately discard poor options. For example, if an interaction would cut off a pedestrian—raising collision risk and the likelihood of intervention—the entire branch is deleted and no longer computed.
The remaining high-scoring nodes are aggregated into a final Trajectory Score, and the vehicle carries out the winning plan.
This pruning is key to backward compatibility. During the 2026 Q1 earnings call, Ashok Elluswamy confirmed that the upcoming v14-Lite update will bring functional feature parity to older HW3 cars, even though that hardware lacks the raw power needed for Robotaxi operations.
By quickly removing inferior choices from active consideration using the hierarchical nodal graph, the overall compute required to navigate complex urban environments is greatly reduced.
This software efficiency enables the less powerful HW3 computers to run V14’s more advanced behavioral logic without being overwhelmed.
The patent highlights that software efficiency can be a decisive advantage: by steering more like humans, the system achieves more with significantly less.
If this look at how FSD makes decisions was helpful, the rest of the deep‑dive series may also be of interest:
How FSD Works Part 1
How FSD Works Part 2
How FSD Works Part 3
How FSD Works Part 4
How FSD Works Part 5
Tesla’s Universal AI Translator
How Tesla Optimizes FSD
How Tesla Will Label Data with AI
How Tesla Solves for GPS Deadzones

































Condividi:
Tesla Cybercab Spotted Testing with Starlink Dish
Tesla to Launch FSD v14.3 with Spring Update Features Soon