

Automakers have long depended on the Global Positioning System (GPS) to guide vehicles, which works well on open roads but fails in places where satellite signals disappear—such as underground areas, multi-level parking structures, and dense urban canyons.
For a person, losing navigation in a garage is inconvenient. For an autonomous system, it is a critical loss of orientation.
A newly published Tesla patent titled Modeling Techniques for Vision-Based Path Determination (US 2026/0098740) explains how the company addresses this limitation.
By removing reliance on satellite-derived location data and using a self-contained, vision-driven approach, Tesla aims to make its Robotaxi service robust in parking garages while also establishing the core navigation capabilities for the Optimus humanoid robot.
The Problem with Concrete Canyons
Traditional localization in autonomy typically combines pre-mapped, high-definition GPS coordinates with onboard sensors to estimate position.
In a multi-level parking garage, reinforced concrete blocks GPS entirely. Without a satellite fix, a conventional system cannot localize, select a route to an empty spot, or find an exit. The vehicle is then operating in a crowded, dynamic space with pedestrians, carts, and human drivers, but without reliable global position.
Tesla determined that a truly unsupervised Robotaxi network cannot depend on an external signal. If a Robotaxi ends up on level four of an underground mall garage and loses satellite contact, the system must still localize and navigate using only onboard hardware.
How the Vision-Based Brain Works

The patent describes a method for Tesla’s FSD ego to perceive its surroundings, determine its pose, and plan motion without GPS or any external location-tracking sensors. The “ego” may be either an autonomous vehicle or a humanoid robot.
Instead of seeking a satellite signal, the system uses live camera inputs to construct a real-time 3D representation of the scene via a deeply complex Occupancy Network.
The computer partitions space into tiny, three-dimensional cells known as voxels. In real time, the neural network assesses each voxel for two properties: whether it is occupied or free, and what surface attributes it has—for example, distinguishing drivable asphalt, concrete sidewalk, or a painted parking line.
GPS-Free Localization via Vision
Building a 3D map is only the first step; the system must also determine its precise location within that map. The patent details a vision-based localization method that does not require GPS.
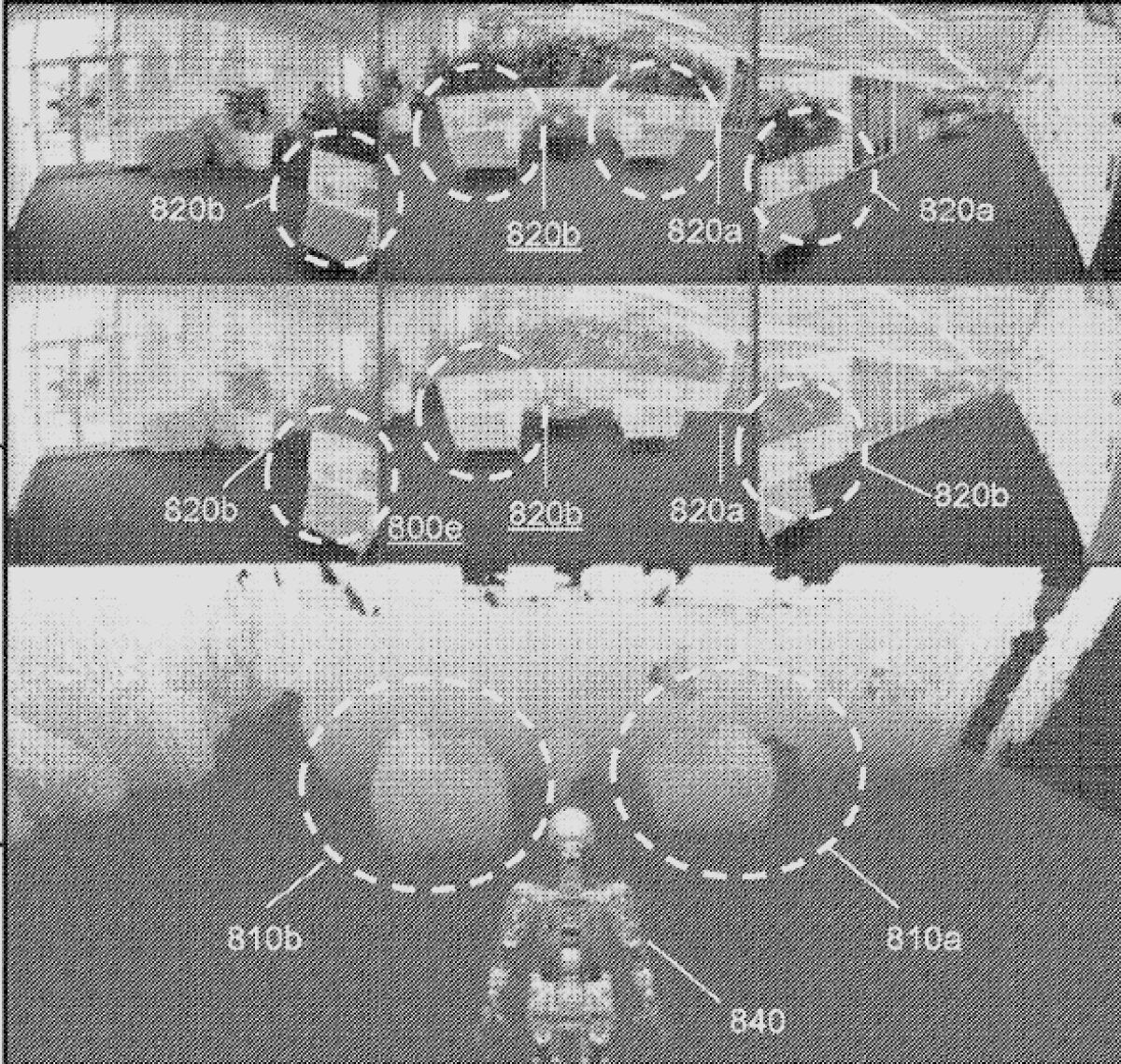
As cameras scan the garage, the network picks out distinctive visual anchors in the environment—referred to as key image features—such as a bright exit sign, a fire extinguisher mounted on a pillar, or a particular crack in a wall.
The computer tracks how these features move across consecutive frames as the vehicle advances. By measuring changes in their apparent distance and angle relative to the cameras, the system computes the ego’s exact position inside its internally constructed 3D model, independent of external references.
With position known and the environment modeled, the planner applies trajectory optimization. The patent specifically mentions using an Iterative Linear Quadratic Regulator to compute a safe, smooth path while continuously modulating forward velocity, lateral motion, and yaw rate to steer around obstacles and reach the target parking stall.
Solving the Parking Garage for FSD
This vision-based localization already appears in customer vehicles and underpins the behavior that enables Actually Smart Summon to work effectively.
FSD v14.3.2 enters a parking garage, pulls right up to the ticket dispenser and proceeds when it opens. pic.twitter.com/HjvBYdcCft
— Zack (@BLKMDL3) April 26, 2026
When an owner summons the car across a parking garage, the vehicle is not using GPS to locate them. It builds a 3D map with the voxel-based occupancy network, locks onto key image features to track progress, and plans a path that adapts to pedestrians and wayward carts.
As Full Self-Driving advances, this local visual mapping will let consumer cars enter complex underground facilities, find available spaces, park, and later exit—without relying on satellite data.
The Ultimate Challenge: Optimus
The same approach applies directly to Optimus. While cars only sometimes encounter GPS dead zones, humanoid robots operate almost entirely within them.
Whether an Optimus unit is moving heavy castings on the floor of Gigafactory Texas or folding laundry in a home, it cannot count on GPS. It must perceive its surroundings, avoid moving obstacles, and know its own pose using only cameras in its head.
Because the AI stack is designed to be platform-agnostic, the architecture described in the patent is shared between vehicles and robots. Optimus uses its cameras to generate the same 3D voxel map, identifies key image features in a residence—such as a television or a distinct couch cushion—to localize, and then applies the same trajectory optimization to chart a safe path to the kitchen without colliding with furniture.
Solving garages for vehicles also solves indoor navigation for humanoids. The result is a localized, vision-only navigation system engineered to handle complex environments whether it is rolling on four wheels or walking on two legs.














Share:
Tesla Kicks Off High-Volume Semi Production in Nevada
Tesla Issues Physical Recall for Cybertruck 18-Inch Steel Wheels; Reveals RWD Cybertruck Sales